Human-robot interaction for collaborative robotics
01/06/2018 – 31/05/2021
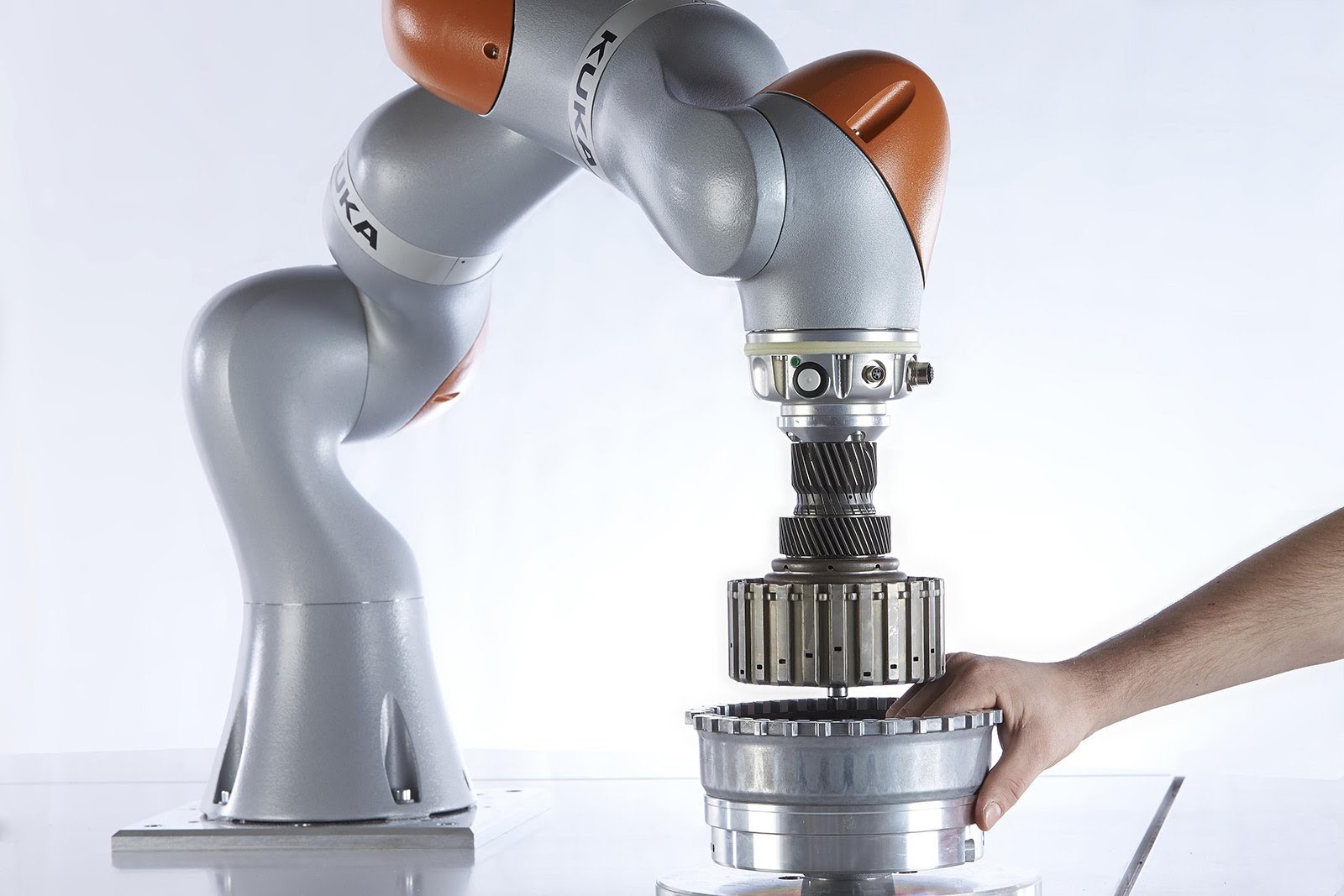
Robots are increasingly present in our lives, sharing the workspace with humans. However, existing interfaces for human-robot interaction/cooperation (HRI/C) are neither intuitive nor safe. COBOTIS will create a new collaborative robot in which robot and human co-worker understand and assist each other. Human behaviours and gestures have to be recognized in continuous recurring to the most advanced pattern classification techniques like deep and reinforcement learning. The inputs for these algorithms are data from multimodal sensor systems capturing the robot environment occurrences. In certain modes of operation, the COBOTIS robot has the autonomy to carry out their tasks so that the collision avoidance ability will be required to operate in a dynamic industrial environment while keeping the task target. Kinematics and dynamics controllers ensure a smooth path control. The COBOTIS robot will be tested in an automotive assembly use case working side-by-side with a human co-worker.
Contact: António Paulo Moreira ![]()
Partners: University of Coimbra