Micropipetting Robot
2016
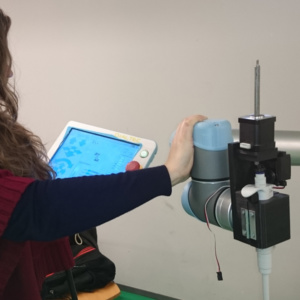
Throughout time, researchers have gathered innumerous experimental clues about the usage of the micropipetting technique in lab trials. However, certain phenomena like operators’ ergonomics has been correlated with the continuous sequence of movement associated with the high time constraint associated with this technique. In an attempt to address this situation, this project focused on the development of an automated lab stand system in order to reduce time in monotonous tasks. This project involved the manipulation of a robotic arm (UR5), together with the operations related to the retrieval and dispensation of volumes, resuspension / homogenization of the solution, but also the placement and ejection of the micropipette tip. To make these tasks feasible, an adequate tool was also created. With the above context in mind, a sturdy end effector capable of enduring, controlling and automatically regulate an Eppendorf micropipette – Research Plus was developed.
The UR5 robot is a collaborative robot that allows the interaction with the user using teaching methods such as kinesthetic teaching, making the overall system more flexible and intuitive. With the purpose of restraining the usage of the robot’s console and make the system easier to use, a web graphical interface was developed offering several functionalities associated with the robot manipulation in regards to the micropipetting protocol.
The system’s robustness when dealing with human-robot-interaction opens the possibility to improve overall productivity, optimize time, costs and work efficiency.
Contact: Germano Veiga ![]()