
Mobile Manipulators
CRIIS is specialized in mobile manipulators for use in Industry and Services. The centre has known experience in developing solutions for AGV (Autonomous Guided Vehicles), as well as in industrial manipulators.
These systems can be used both in Industry or in Services, performing transport operations, automation of repetitive tasks, machine tending and assembly activities, for instance.
Some of the fields researched in this topic are:
• Localization and Navigation in Indoor Facilities
• Projection Mapping
• Programming by Demonstration of Industrial Manipulators
• Environmental Perception

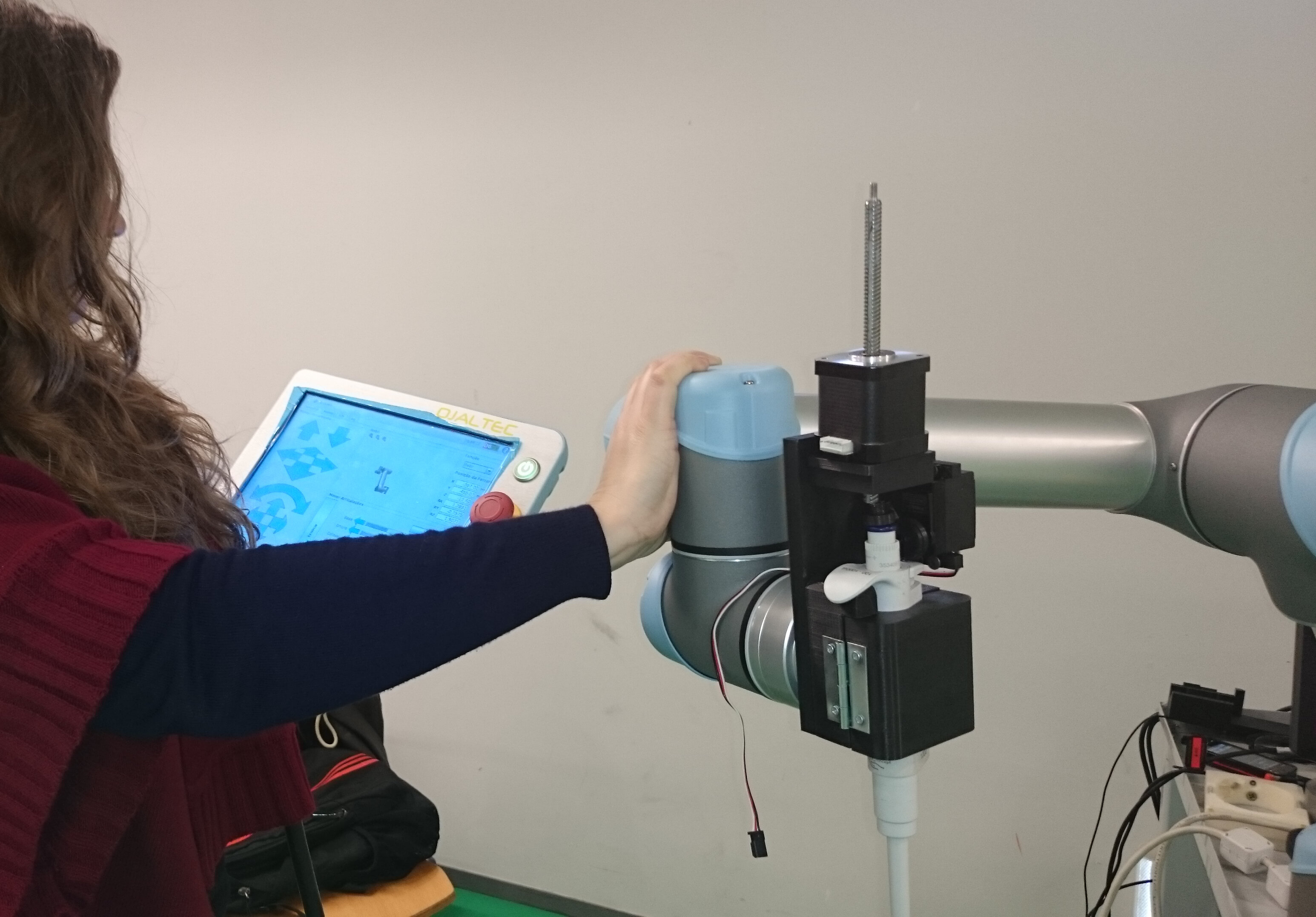
Collaborative Robotics
With the advent of Industry 4.0, collaborative robotics have gained increased importance and are changing human-robot interaction. The mindset is changing from encapsulating robots away from humans to having them work side by side with people.
Some of the works in CRIIS focus on Human-Robot interaction, Kinesthetic Teaching and incorporation of robots in the daily tasks of workers. Robots can handle repetitive tasks while humans work on complementing tasks and supervise the system, or help directly the human, working with him in a certain task. Examples of the latter can comprise the indication of where to put a certain piece for welding operations, using projection, or dividing tasks between the robot and human.
These systems can be of great importance to increase the homeostasis of such environments, increasing the human potential by augmenting the efficiency and quality of the work performed.
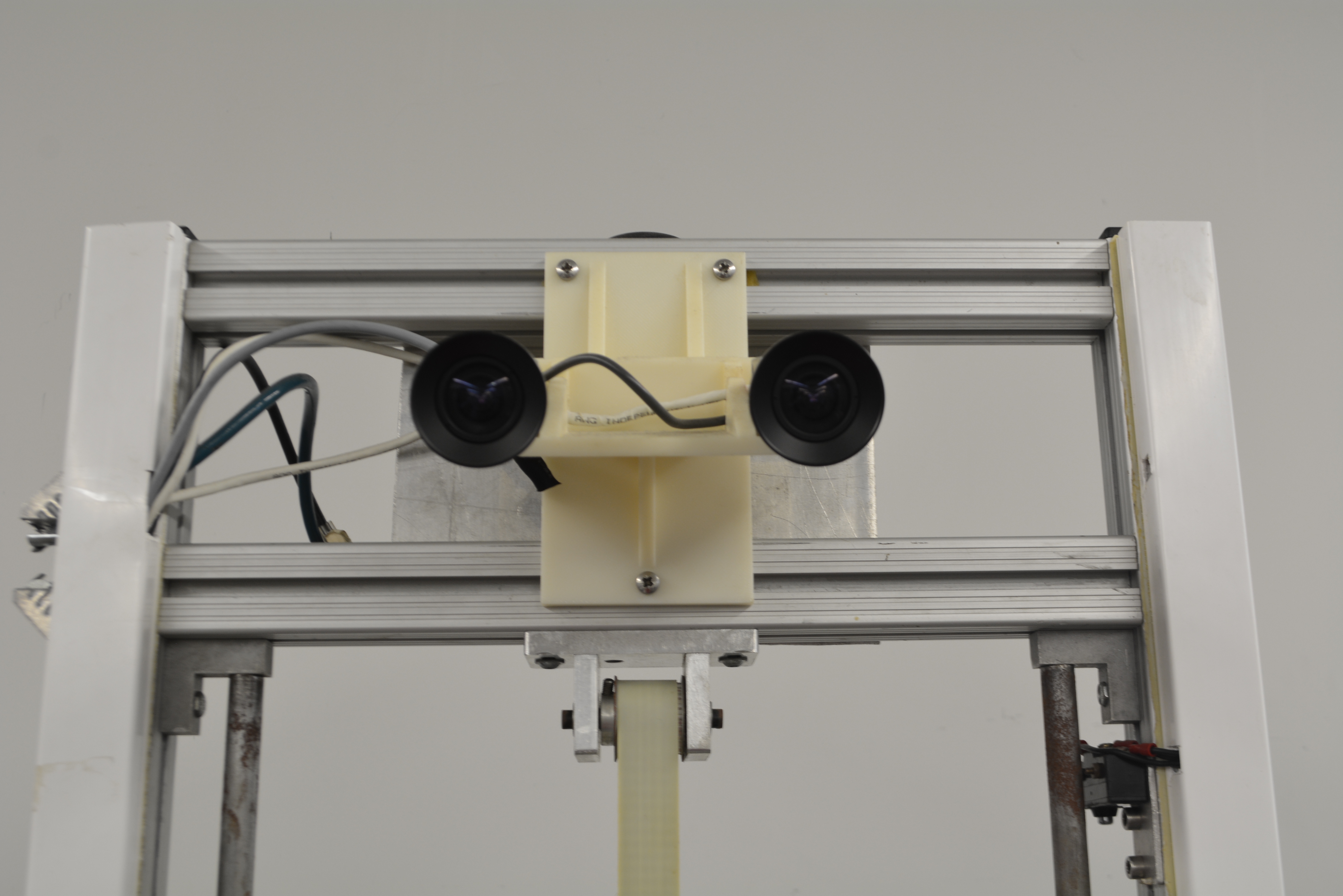
Sensors and Intelligent Systems
CRIIS is specialized in the development of intelligent sensors and perception systems for application in robotics, as well as artifitial vision systems for real time autonomous systems.
Some projects performed until now include the inspection of materials for quality control, sensing of the surroundings for detection of inconsistencies when comparing to a world model, picking and object recognition tasks.
Agro
Our team research and develop robotics solutions for application in agriculture and forestry context.
Our team has three robotic platforms to research and develop robotic components:
• Localization and Mapping (robustness to GNSS/GPS faults)
• Path planning (for steep slope vineyards)
• Visual perception
• Manipulation
• Safety
Agrob webpage
